
In the second semester, we built a maze-solving LEGO™ robot. It followed black lines on a paper sheet on the ground with intersection points in a grid. The task was to build and program the whole robot from scratch. During debugging, we were able to check our calculated position in the maze with a server on the network.
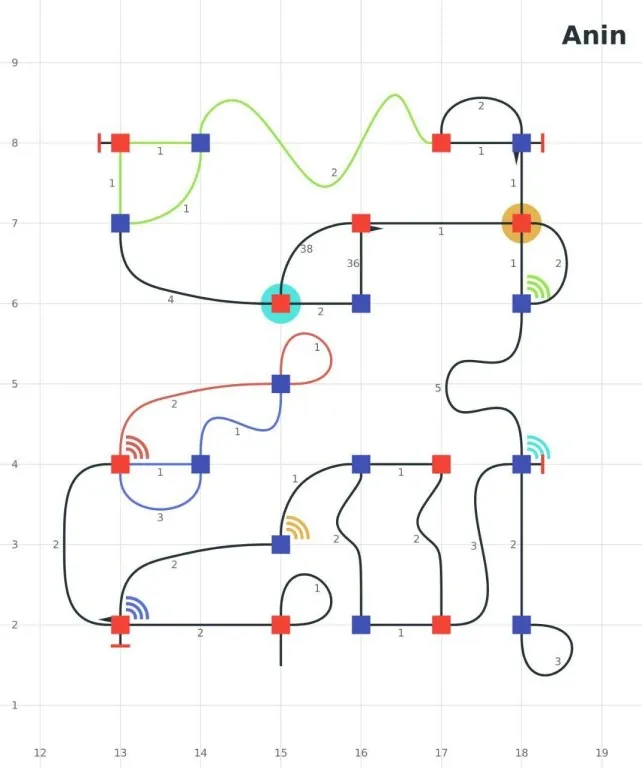
My task was to develop the maze-solving algorithm using Dijkstras Algorithm as well as establishing and managing the connection and communication to the server.